Main Page
| Welcome to the Bespoke Robot Society |
| Building robots that work. Open source. Low cost. For everyone. |
Our Mission
Our mission is to lower the barrier to robotics: to create a world where building a robot to execute real-world tasks in your home or workplace is as simple as assembling a PC today. The plans and software for these robots must be open-source, or automation of daily tasks will be locked behind a paywall.
At the Bespoke Robot Society, we believe you should build your own robot that is exactly what you want it to be. But that's far too difficult today for beginners, and starting from scratch leaves far too much to be done. So start with one of our designs, duplicate it exactly or use it as the starting point to your own designs. That's the power of open source.
We are at the beginning of our journey. Join us.
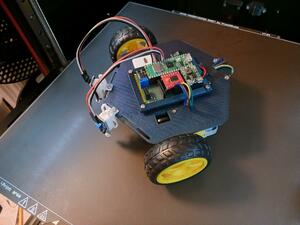
Featured Robot: SimpleBot
|
|
SimpleBot - Your First RobotSimpleBot is BRS's original robot design: a low-cost, educational differential drive robot that demonstrates core robotics concepts without compromising on capability. What it does:
What you'll learn:
Cost: Under $20 (including batteries) |
Core Competencies
The Society organizes robotics knowledge into Core Competencies - the individual skills required to go from a pile of parts to a robot completing a task. Our goal is to provide step-by-step instructions for each skill, or open-source methods to outsource that task.
| Competency | Description | Get Started |
|---|---|---|
| 3D Printing | Design and manufacture custom plastic parts for robot chassis and mounting systems | 3D Printing Basics |
| Electronics | Understand circuits, components, sensors, and actuators; design and assemble electronic systems | Electronics Fundamentals |
| Soldering | Join electronic components to create functional circuits; through-hole and surface-mount techniques | Soldering Guide |
| PCB Design | Design custom printed circuit boards to integrate electronics into compact, reliable packages | KiCad Tutorial |
| Software | Program microcontrollers and single-board computers to control robot behavior | MicroPython Basics |
| Mechanics | Apply mechanical engineering principles to robot motion, structure, and tool interfaces | Mechanical Design |
Wiki Structure
Robots
Complete robot designs with full documentation, code, and CAD files:
- SimpleBot - Differential drive robot with line following and odometry
- More robots coming soon...
Components
Detailed references for electronic components, sensors, and modules:
- Microcontrollers: Raspberry Pi Pico, ESP32, Arduino
- Motor Drivers: TB6612FNG, L298N
- Sensors: Infrared Line Detector, MPU6050
- Power: MP1584, Battery Management
Skills & Tutorials
Step-by-step guides for building and programming robots:
- 3D Printing for Robotics
- Soldering Techniques
- MicroPython Programming
- Motor Control Basics
- Sensor Interfacing
Build Logs
Community members document their robot builds:
Recent Updates
2025-10: SimpleBot CAD v1.0 released with improved sensor mounting and modular chassis design
2025-10: SimpleBot review units shipped - first robots in the hands of testers
2025-01: SimpleBot PCB design finalized (through-hole version for easy assembly)
2024-09: SimpleBot prototype tested - successful line following and odometry demonstrations
Get Involved
The Bespoke Robot Society is a collaborative effort. Here's how you can participate:
- Discord - Real-time chat, questions, and project discussions
- GitHub Organization - Contribute code, CAD files, and documentation
- Mailing List - Monthly updates and announcements
- Contribute to the Wiki - Share your knowledge and document your builds
Membership
BRS has no dues, no formal membership requirements, and no gatekeeping. If you're building robots and contributing to the community, you're a member. See membership structure for informal titles based on contribution level.
About
Learn more about the Bespoke Robot Society:
- Mission Statement and Structure
- Philosophy: Battlebots Are Not Robots
- Philosophy: Beyond Toys
- Philosophy: Cheap Stuff Works
- Philosophy: Toddler Testing
This wiki is maintained by the Bespoke Robot Society community.
All robot designs, code, and documentation are open source.
Learn more about BRS | GitHub | Contact